Nach einem Zusammenstoß meines HK-450 mit eim anderen Hubschrauber (Ja, das schafft man problemlos mit zwei Hubschraubern auf einem Flugplatz) erlegte es meinen HK-450 sehr gründlich.
So gründlich, daß auch das Kreisel nicht überlebte.
Da die flybarless-Ansteuerung allseits gelobt wird und das Microbeast-System inzwischen auch nicht mehr viel teurer als ein guter Kreisel ist, fiel die Wahl natürlich auf den Umbau auf flybarless-Ansteuerung für das Nachfolgemodell.
Die BMS-Servos sind dafür allemal geeignet, also fehlt dafür nur noch der passende Rotorkopf und dieses 3G-System.
Natürlich kamen auch hier wieder die 20EUR Kunstflugrotorblätter drauf.
Den Regler tauschte ich gegen einen K-Force K40.
Vorteilhaft ist beim K40, daß man direkt die Solldrehzahl vorgibt und nicht eine Drehzahl nach dem Hochlauf übernommen wird.
Damit hat der K40 den Vorteil, daß man bei allen Akkus sie gleiche Rotordrehzahl erhält.
Dann bleibt auch das Flugverhalten über alle Akkus gleich.
HK 450 mit paddelloser Ansteuerung.
Die mechanische Montage gestaltete sich vorerst einfach.
Einfach den alten Rotorkopf samt Mischhebeln entfernen, neuen Kopf montieren, fertig.
Rotorkopf für paddellose Ansteuerung.
Das Microbeast ist allerdings schon deutlich aufwändiger einzurichten.
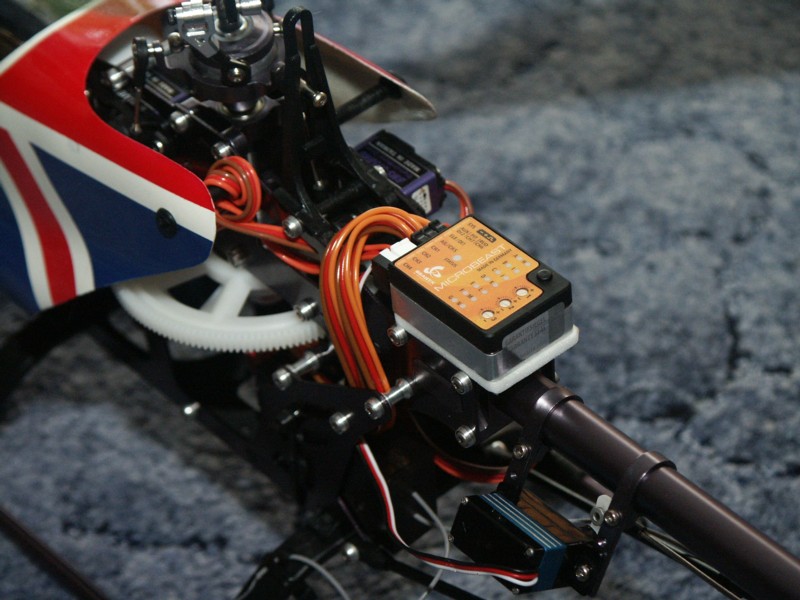
Montiertes Microbeast.
Bis man da korrekt durch alle Menüpunkte durch ist und alle eingestellten Servowege passen vergehen deutlich mehr als 5min.
Während der Einstellarbeiten stellten sich vor allem die Steuerwege als kritisch heraus.
Das Microbeast steuert die Servos mit sehr großen Ausschlägen an, die sich nicht in die Region 50% herunterstellen lassen.
Die sich daraus ergebenden Winkelbereiche der Servohebel sind sehr groß.
Hier braucht man scheinbar Servos mit geringen Ausschlägen.
(Einen Versuch mit Serienwiderständen an den Einstellreglern der Servos werde ich noch starten, um die Winkelbereiche zu verkleinern.)
Das führt zu Problemen im Bereich des minimalen und maximalen Pitches.
Die maximale zyklische Blattverstellung ließ sich aufgrund der Anschläge nicht auf das nach Anleitung gewünschte Maß bringen.
Anscheinend sind die Übersetzungsverhältnisse der Hebel an diesem Rotorkopf etwas zu groß für die Taumelscheibe.
Doch vorerst sollte es damit ins Rennen gehen.
Beim Erstflug stellten sich noch einige Probleme der Mechanik heraus.
Der Heckrotor hatte eine kleine Unwucht (leicht exzentrische Bohrung des Zentralstücks), die zu (beim Anfassen) spürbaren Vibrationen führte.
Das reichte aus, um die Sensoren im Microbeast verrück spielen zu lassen.
Die Folge war kaum aufhaltbarer ein Drang des Hubschraubers zum Abkippen.
Damit war es in der Luft nicht möglich, ihn ruhig/gerade zu halten.
Nach einigen Minuten starken Schwitzens und anschließendem Beseitigen der Unwucht lag er wie ein deutlich größerer Hubschrauber in der Luft.
Das verlangte sofort nach einigen Loopings, Rollen und Überschlägen.
Dabei läßt er sich gefühlt deutlich sauberer Aussteuern als vorher.
Die Investition hat sich auf jeden Fall gelohnt.
Nach einer Menge von Flügen fliege ich inzwischen lieber mit dem 450er mit Microbeast als mit dem 500er ohne.
Es gibt keine Aufstellneigung mehr.
Loopings, Rollen Aufschwünge erlaubt das System schön präzise, so daß man auch schön waagerecht wieder herauskommt.
Auch in Rückenlage läßt sich das Modell längere Zeit vollig ohne auszusteuern halten.
Dank der sehr guten Flugstabilität mat man auch in Rückenlage sehr viel Zeit zum Aussteuern.
Die Hebelverhältnisse, am FBL-Rotorkopf, die beim Einstellen den Eindruck machten, für zu geringe Steuerwege zu sorgen, stellten sich im Nachhinein als durchaus ausreichend heraus.
Der Rotorkopf ist absolut zu empfehlen.
Im späteren Verlauf wechselte ich auf die Taumelscheibe des 450 Pro.
Sie bietet etwas größere Roll- und Nickaussteuerung für eine bessere Agilität des Modells.
Fliegt man viele 3D-Manöver, lohnt es sich, in gute Akkus zu investieren.
Meine Akku-Vorräte zeigen nach einem Jahr deutliche Unterschiede in der Performance.
Mit einigen davon geht die Spannung bereits vor Erreichen der 4min-Grenze soweit in die Knie, daß man eine Notlandung machen muß.
Die besten Erfahrungen habe ich mit Rhino-Akkus gemacht.
Die laufen souverän durch und werden auch nicht besonders warm.